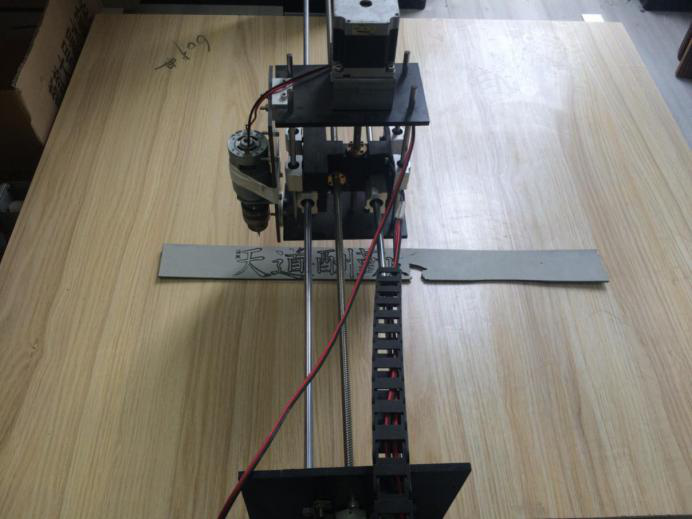
在机械结构上设计制造X、Y、Z数控运动机构实现主轴电机精确运动及定位。采用微机控制数控运动控制器控制分别控制驱动X、Y、Z数控运动步进电机,使主轴电机精确运动及定位,高速主轴电机夹持钻铣刀实现雕刻切割的目地。
项目负责人:张达
指导教师: 唐晓明 张连志