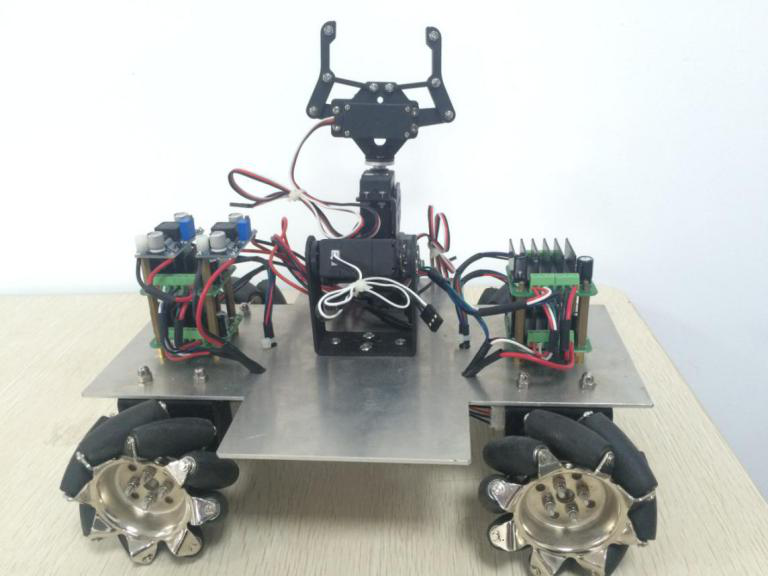
通过电机控制麦克纳姆轮实现万向行走,采用单片机系统及二维码识别模块、颜色识别模块搬运对任务和物料种类的识别的识别,通过控制转臂及机械手实现抓取搬运物品的目的。
项目负责人:庄家杨
指导教师: 唐晓明 张卫卫